11/06/2020
In the bustling urban landscape, where every minute counts, the ability to predict the destination of a taxi could revolutionise transport efficiency, urban planning, and the overall passenger experience. Imagine a world where taxi dispatchers can anticipate demand, drivers can optimise their routes, and city planners can better understand traffic flow. This seemingly futuristic capability is becoming a reality, largely thanks to the power of advanced artificial intelligence, specifically Recurrent Neural Networks (RNNs), with a particular emphasis on Bidirectional Recurrent Neural Networks (BRNNs).
These sophisticated models are adept at understanding the subtle patterns within sequential data, making them perfectly suited for analysing the dynamic nature of a taxi's journey. By examining the initial segment of a taxi's trajectory alongside various contextual clues, known as metadata, BRNNs can make remarkably accurate predictions about where a passenger is headed. This article will delve into how these intelligent systems work, exploring the intricacies of their operation and the profound impact they have on our understanding of human mobility networks and the urban environment.
- The Intricate Challenge of Taxi Destination Prediction
- Unpacking Recurrent Neural Networks (RNNs): The Foundation
- The Enhanced Capability: Bidirectional Recurrent Neural Networks (BRNNs)
- The Crucial Data: Taxi Trajectories and Associated Metadata
- How BRNNs Predict Destinations: A Step-by-Step Breakdown
- Applications and Transformative Benefits
- Challenges and Future Directions
- Comparing Destination Prediction Methods
- Frequently Asked Questions (FAQs)
The Intricate Challenge of Taxi Destination Prediction
Predicting where a taxi is going might sound straightforward at first glance, but it's a problem fraught with complexity. Unlike a train with a fixed route or a bus with scheduled stops, a taxi's journey is highly dynamic and influenced by a multitude of factors. Passengers choose destinations based on personal preference, time of day, current events, and even the weather. Furthermore, drivers might take different routes to the same destination depending on traffic conditions, roadworks, or their own local knowledge.
Traditional methods, often relying on simple statistical analysis or rule-based systems, quickly fall short when faced with this level of variability. They struggle to capture the non-linear relationships and the rich contextual information embedded within a taxi's movement patterns. This is precisely where machine learning, and especially deep learning models like RNNs, come into their own. They offer a powerful framework for learning these complex, hidden patterns from vast amounts of historical data, enabling them to make predictions that are far more nuanced and accurate than their predecessors.
Unpacking Recurrent Neural Networks (RNNs): The Foundation
Before we explore the bidirectional variant, it's essential to understand the fundamental concept of a Recurrent Neural Network. Unlike traditional feedforward neural networks, which treat each input independently, RNNs are specifically designed to process sequential data. Think of a sequence as a series of events where the order matters – a sentence, a stock price history, or, in our case, a taxi's trajectory over time.
The key innovation of an RNN lies in its 'memory'. It has internal loops that allow information to persist from one step of the sequence to the next. When an RNN processes a point in a taxi's trajectory, it doesn't just look at that single GPS coordinate and timestamp; it also considers the information it processed from the *previous* points in the journey. This 'recurrent' nature enables it to understand context and dependencies across time. For example, if a taxi has been heading north-east for the last five minutes, an RNN can use that information to infer a likely continuation of its path, rather than treating each second of movement as an isolated event.
However, basic RNNs have their limitations. They often struggle with what's known as the 'vanishing gradient problem', making it difficult for them to learn long-term dependencies. This means that information from very early parts of a long sequence might get 'forgotten' by the time the network processes later parts. For a taxi journey that might involve several turns or a long straight stretch, this could be a significant drawback.
The Enhanced Capability: Bidirectional Recurrent Neural Networks (BRNNs)
This is where Bidirectional Recurrent Neural Networks (BRNNs) enter the scene, offering a significant improvement for tasks like destination prediction. While a standard RNN processes a sequence in one direction (e.g., from the start of the trajectory to the current point), a BRNN processes the sequence in *both* directions simultaneously.
Imagine two separate RNN layers: one that reads the taxi trajectory from its starting point forwards in time, and another that reads the same trajectory from the current point backwards towards the start. The outputs from both these layers are then combined at each step. Why is this powerful? Because it allows the model to capture context from the entire available segment of the taxi's journey – both what has just happened and what is still to come in the *observed* part of the trajectory.
For predicting a taxi's final destination, having this 'forward' and 'backward' view is incredibly valuable. The forward pass can track the evolving direction and speed, while the backward pass can help solidify the understanding of the initial conditions and how the journey started. This comprehensive understanding of the trajectory's flow provides a much richer context for making an accurate prediction, making BRNNs particularly effective for tasks where the entire input sequence provides crucial clues, even if the prediction is made mid-sequence.
The Crucial Data: Taxi Trajectories and Associated Metadata
The success of any machine learning model hinges on the quality and richness of its input data. For predicting taxi destinations, this input typically comprises two main components:
Taxi Trajectory Start:
This refers to a sequence of GPS coordinates (latitude and longitude) and corresponding timestamps, capturing the initial segment of a taxi's journey. Each point in the sequence represents the taxi's location at a specific moment. The length of this 'start' segment is crucial; a longer segment provides more information but also means the prediction is made later in the journey. The goal is often to predict the destination as early as possible, so models might be trained on relatively short initial segments.
Associated Metadata:
Beyond just location and time, various other pieces of information can significantly enhance prediction accuracy. This 'metadata' provides crucial context that a simple trajectory alone cannot convey. Examples include:
- Time-based features: Hour of the day, day of the week, month, public holidays. Demand for certain destinations varies drastically between rush hour, late night, weekdays, and weekends.
- Environmental factors: Weather conditions (rain, snow, clear sky) can influence route choices and destination popularity.
- Vehicle/Driver information: While less directly tied to *destination*, driver behaviour patterns or vehicle types could sometimes offer subtle clues.
- Passenger count: Knowing if there's a single passenger or a group might hint at different types of destinations (e.g., a single person might go to work, a group to a restaurant or event).
The Significance of Points of Interest (POIs)
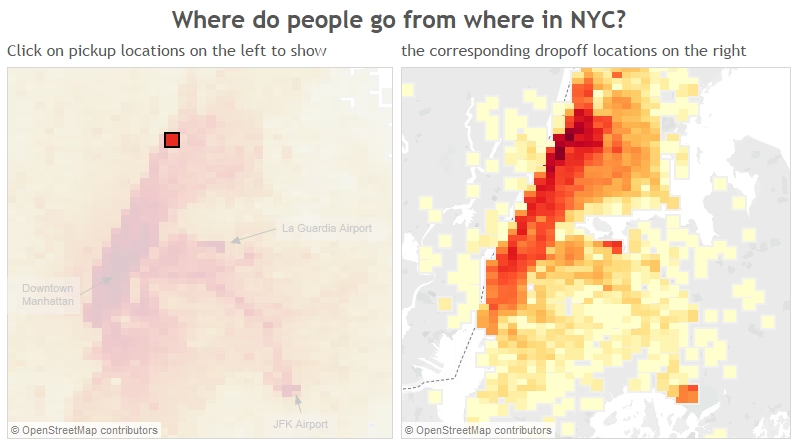
A particularly important aspect of the metadata, and a key output for many destination prediction models, involves Points of Interest (POIs). POIs are specific locations in a city that attract human activity, such as train stations, airports, shopping centres, business districts, hospitals, tourist attractions, or residential areas. Understanding the relationship between taxi trajectories and POIs is fundamental because human mobility patterns are strongly influenced by these points.
For instance, at 8 AM on a Monday, a taxi starting from a residential area is highly likely to be heading towards a business district or a major transport hub (like a train station) that connects to a business district. Conversely, on a Saturday evening, a taxi from a city centre might be heading towards entertainment venues or residential areas. By mapping taxi movements to these significant locations, BRNNs can learn complex associations and make more informed predictions about the final stopping point.
How BRNNs Predict Destinations: A Step-by-Step Breakdown
The process of using a BRNN to predict a taxi's destination involves several critical stages:
Data Collection and Preprocessing:
Raw GPS data is often noisy and irregular. It needs to be cleaned, interpolated (to fill gaps), and standardised. Trajectories are segmented into sequences of points. Metadata is extracted and encoded appropriately – for example, categorical data like 'day of the week' might be converted into numerical representations (one-hot encoding), and numerical data like 'speed' might be normalised to a common scale. GPS coordinates themselves might be converted into grid cells or clusters to simplify the output space.
Feature Engineering:
Beyond raw data, new features can be engineered. This might include calculating instantaneous speed, acceleration, bearing changes, or the distance from the trajectory start to known POIs. These derived features can provide richer information for the model to learn from.
Input Layer:
The preprocessed trajectory points (e.g., latitude, longitude, timestamp, speed, bearing) and associated metadata are fed into the BRNN. Each 'time step' in the sequence corresponds to a single point in the taxi's trajectory with its accompanying features.
BRNN Layers:
The core of the model consists of multiple BRNN layers. Each layer processes the sequence both forwards and backwards, maintaining an internal 'hidden state' that encapsulates the learned context up to that point (from both directions). These layers learn to identify patterns and relationships within the sequential data.
Output Layer:
After processing by the BRNN layers, the combined contextual information is passed to an output layer. This layer is responsible for making the final prediction. The nature of this layer depends on what exactly is being predicted:
- Specific POI: The model might output a probability distribution over a predefined set of known POIs, indicating the likelihood of the taxi heading to each one.
- Grid Cell: The city map could be divided into a grid, and the model predicts the probability of the destination falling into each grid cell.
- GPS Coordinates: In more complex setups, the model might directly predict the latitude and longitude of the final destination, though this is often harder due to the continuous nature of the output.
Training and Optimisation:
The BRNN is trained on a large dataset of historical taxi journeys, where both the trajectory start and the actual final destination are known. During training, the model's predictions are compared to the true destinations, and a 'loss function' quantifies the error. An optimisation algorithm (like Adam or SGD) then adjusts the model's internal parameters (weights and biases) to minimise this error, iteratively improving its prediction accuracy.
Applications and Transformative Benefits
The ability to predict taxi destinations has far-reaching implications across various sectors:
Urban Planning and Traffic Management:
By understanding predicted traffic flows to major destinations, city planners can better design road networks, optimise traffic light timings, and plan for future infrastructure development. This can lead to reduced congestion and more efficient use of urban space. It also helps in identifying areas with high demand for transport services.
Taxi Fleet Management and Dispatching:
Taxi companies can use these predictions to dynamically dispatch vehicles to areas where future demand is anticipated. This reduces 'empty miles' (the distance a taxi travels without a passenger), leading to higher driver efficiency, increased earnings, and lower fuel consumption. It also allows for more intelligent pricing strategies based on predicted demand and supply.
Enhanced Passenger Experience:
Passengers could benefit from more accurate estimated arrival times (ETAs) if the system knows the likely destination and can therefore better predict the entire route. Furthermore, the technology could enable personalised recommendations for routes or even suggest alternative transport options if the predicted destination is far from current taxi availability.
Research into Human Mobility:
The models themselves, once trained, can offer insights into the complex relationship between human mobility patterns and urban POIs. Researchers can analyse the learned weights and patterns within the BRNN to understand which factors most strongly influence destination choices at different times and locations, contributing to a deeper understanding of urban dynamics.
Challenges and Future Directions
While BRNNs offer significant advancements, challenges remain. Data privacy is a paramount concern, as taxi trajectory data can be highly sensitive. Ensuring anonymisation and secure data handling is crucial. Computational cost can also be high, especially with very long trajectories and complex models, requiring powerful computing resources for training and real-time inference.
Future research is exploring ways to integrate BRNNs with other advanced neural network architectures, such as attention mechanisms (which allow the model to focus on the most relevant parts of the trajectory) or transformer networks (which have shown remarkable success in sequential data processing). Hybrid models that combine geographic information systems (GIS) data with deep learning are also promising, aiming to provide even more context-aware and robust predictions. The continuous evolution of these technologies promises even more sophisticated and accurate destination prediction capabilities in the years to come.
Comparing Destination Prediction Methods
To fully appreciate the power of BRNNs, it's useful to compare them with other approaches:
| Method | Description | Pros | Cons |
|---|---|---|---|
| Traditional Statistical Models | e.g., Linear Regression, Markov Chains. Relies on historical averages or simple state transitions. | Simple to implement, interpretable. | Struggles with non-linear relationships, limited ability to capture complex temporal dependencies. |
| Basic Recurrent Neural Networks (RNNs) | Processes sequential data, retaining information from previous steps. | Good for understanding basic sequences. | Prone to vanishing/exploding gradients, difficulty learning long-term dependencies. Processes unidirectionally. |
| Long Short-Term Memory (LSTM) / Gated Recurrent Unit (GRU) | Advanced RNNs with 'gates' to control information flow, mitigating gradient issues. | Handles long-term dependencies much better than basic RNNs. | Still typically processes unidirectionally, potentially missing full context from observed trajectory. |
| Bidirectional Recurrent Neural Networks (BRNNs) | Processes sequences in both forward and backward directions, combining context. | Captures richer context from the entire known trajectory segment. Highly effective for prediction tasks where full context is vital. | More computationally intensive than unidirectional RNNs, requires careful data preparation. |
Frequently Asked Questions (FAQs)
What exactly is a 'Point of Interest' (POI) in this context?
A POI refers to any specific location that is significant for human activity or mobility, such as airports, train stations, major shopping centres, business parks, hospitals, universities, or even specific residential clusters. These are often the actual or common destinations for taxi journeys, and understanding their distribution and popularity is key to prediction.
Why not just use GPS coordinates directly for the destination?
While theoretically possible, predicting exact GPS coordinates as a continuous value is much harder for a model than predicting one of a discrete set of POIs or grid cells. There's an infinite number of possible GPS points, making the prediction space vast. Predicting a category (like a POI) simplifies the problem and often yields more practical and accurate results.
How accurate are these BRNN predictions typically?
Accuracy can vary significantly based on the quality and quantity of data, the complexity of the model, and the length of the initial trajectory segment provided. However, research has shown BRNNs to achieve high accuracy rates, often exceeding 80-90% for top-N predictions (e.g., the correct destination is among the top 5 predicted options), especially when a reasonable portion of the journey has been observed.
Can this technology be applied to other types of vehicle movement?
Absolutely. The principles behind using BRNNs for sequential data are highly transferable. This technology could be adapted to predict the destinations of ride-sharing vehicles, delivery vans, public transport buses, or even personal cars, provided sufficient trajectory data and relevant metadata are available.
Is real-time prediction possible with BRNNs?
Yes, real-time prediction is a primary goal. Once a BRNN model is trained, making a prediction (inference) on a new, unseen trajectory segment is relatively fast. The computational demands are higher during the training phase, but real-time applications are entirely feasible with optimised models and appropriate hardware.
If you want to read more articles similar to Predicting Taxi Destinations: The Power of BRNNs, you can visit the Taxis category.